★給初學者的Arduino+ArduBlock的ppt簡報檔(來源長榮大學按我)
★柯博文的Arduino介紹書410頁pdf檔(來源教育部按我)
★☆給同學的學校Arduino安裝原廠程式下載350M(按我下載) (備用下載)
★☆★420電腦教室『arduino16』下載按我 密碼 2a8f
內裝arduino16(解壓檔在c: 根目錄),板子連上usb 要到C:\arduino16\drivers驅動usb★☆好用的壓縮(含虛擬掛載)工具WinArchiver (介紹教學) (下載)
★ Arduino 報告樣本 (word2003版) (pdf板) 如何文字變漂亮word2010教學 按我
★ 資三忠用的『專題計劃書2014』 (下載按我) (備用載點)
★ 你第一次使用麵包板就上手:10個簡易應用(創客) (連結)
★ 模擬麵包板軟體 (連結)
★ 電腦裝修乙級程式練習 (連結)
★ 資三忠用的『專題計劃書2014』 (下載按我) (備用載點)
★ 你第一次使用麵包板就上手:10個簡易應用(創客) (連結)
★ 模擬麵包板軟體 (連結)
★ 電腦裝修乙級程式練習 (連結)
A. Arduino擦寫時間的機器 原始 資料
影片 網購套件160RMB 網購DIY亞克力套件40RMB 天津購物50 搜〔arduino 寫 時間〕
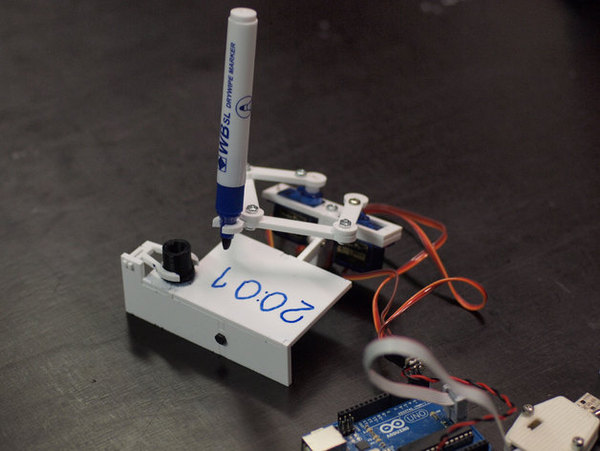
Arduino UNO R3×1塊
9g舵機×3個 sg90一個約NT35元
3mm厚白色亞克力激光切割組裝材料×1套
白金白板筆×1支
3mm×15mm螺栓螺絲墊片×8套
1.5mm自攻螺絲×4個,自備白板筆
Arduino程式碼到topmaker.com.cn技術論壇下載
1.5mm自攻螺絲×4個,自備白板筆
Arduino程式碼到topmaker.com.cn技術論壇下載
B.台幣百元小車D-2 改造計畫(+Arduino智能控制) 參考網址約17RMB
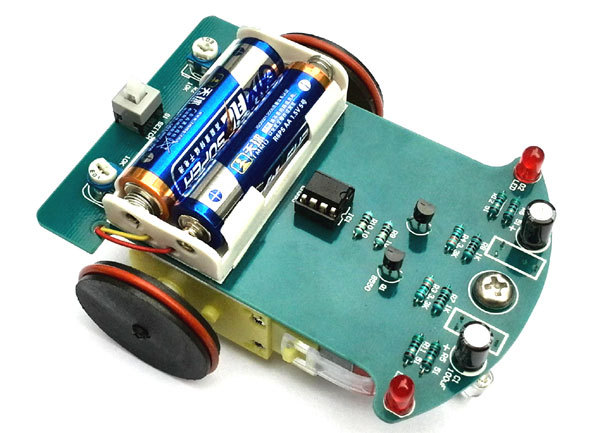 台灣很多的Arduino的智能車都超過一千元,
台灣很多的Arduino的智能車都超過一千元,我們希望利用智能小車再加上不了的控制能
夠在500元完成,就是這個願望所以我們自行
找可用的器材,所以我們找了這個百元小車
說明 : 小黃人會感應接近的手或物體,如果有物體靠近,它會自動躲避障礙

底座×1
中間連接件×1
上端連接支撐件×1
紅外測距X2 超聲波測距模塊(眼睛) X1
舵機SG90 X2
1.25ML保特瓶 X1
制作小黃人還需要自己准備小黃人的身體外殼1.25L的飲料瓶
舵機SG90 X2
1.25ML保特瓶 X1
制作小黃人還需要自己准備小黃人的身體外殼1.25L的飲料瓶



2、A3967步進電機驅動板 兩塊¥14.0X2
3、200毫瓦紅光激光頭 一個¥35.0
4、5v光耦隔離繼電器 一個¥14.0
5、激光散熱座一個¥8.50
6、送:杜邦線公對母6根,母對母6根
7、步進電機延專用長線
架子¥35 參考電路 Nano DIY套件¥128
柝光碟 教學50頁 DIY套件¥128 DIY金冠
國華國中的創客文章
G.Wiimote 窮人的電子白板 影片1 影片2 教學 軟體設定 ipevo


★其他 Arduino 作品
畢業作品代品 (設計|單片機|arduino傳感器制作)
多種微型馬達,想一下可以做一些會飛的竹蜻蜓
Arduino的四軸飛行器-未來的趨勢
Pm2.5空氣檢測儀 199
多種微型馬達,想一下可以做一些會飛的竹蜻蜓
Arduino的四軸飛行器-未來的趨勢
(1)結合KINECT ARDUINO之吹泡泡機 KINECT我們會支援4台
可參考以下影片
(2)手機搖搖搖點燈 比誰搖的厲害 (可多組競賽 增加作品趣味)
手機APP+ARDUINO+一列LED燈排
美元的四軸飛行器14.9
人體電橋-人的可開門鎖 購物¥ 120
自製Arduino Uno 版影片
可手機遙控的『紙飛機』
簡單二進位計數器控制馬達旋轉
樂高3D雕刻機
MAKE 雜誌 Intel Galileo噴水對戰機器人
LittleBits 控製小刀劃線(ArduBlock中有此功能)
來做分色轉盤
wowwee Rovio 路威機器人 影片
超炫自行車風火輪¥ 54.00 A07(32顆led)充電款¥62
IOBOT有趣的互動小機器人(內容豐富好好利用)
512顆LED 光立方影片 商家 資料C語言138MB
★8051開發板資料(300MB) 智杰8051最小系統(138MB)
人體電橋-人的可開門鎖 購物¥ 120
自製Arduino Uno 版影片
可手機遙控的『紙飛機』
簡單二進位計數器控制馬達旋轉
樂高3D雕刻機
MAKE 雜誌 Intel Galileo噴水對戰機器人
LittleBits 控製小刀劃線(ArduBlock中有此功能)
來做分色轉盤
wowwee Rovio 路威機器人 影片
超炫自行車風火輪¥ 54.00 A07(32顆led)充電款¥62
IOBOT有趣的互動小機器人(內容豐富好好利用)
512顆LED 光立方影片 商家 資料C語言138MB
★8051開發板資料(300MB) 智杰8051最小系統(138MB)














